An open atlas of robot hardware
Open robot hardware in one place: source files, visual evidence, BOM evidence, and reproducibility scores where public sources support them. Motari indexes the hardware and defers models to Hugging Face and code to GitHub.
Featured robots
Curated robot-hardware entries with explicit source and coverage labels.
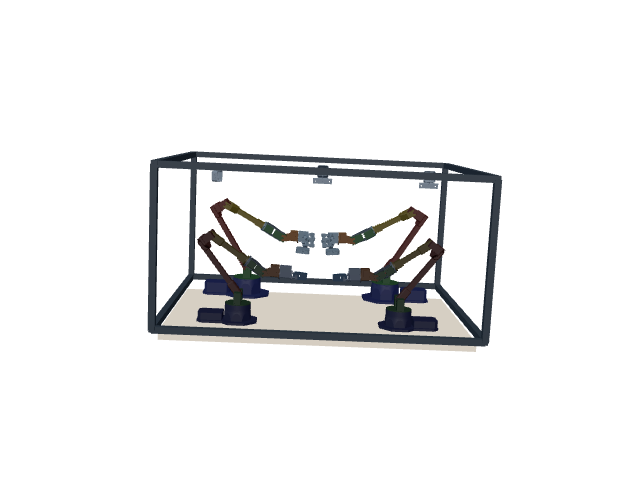
ALOHA
Dual-arm mobile teleop platform for fine manipulation.
JPL Open Source Rover
Build-it-yourself 6-wheel rocker-bogie rover modeled on JPL's Mars rovers.
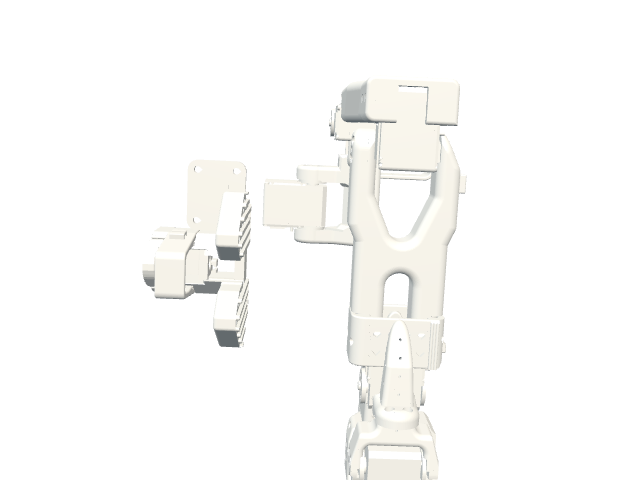
SO-101
Low-cost 6-DoF teleoperated arm, the LeRobot reference.
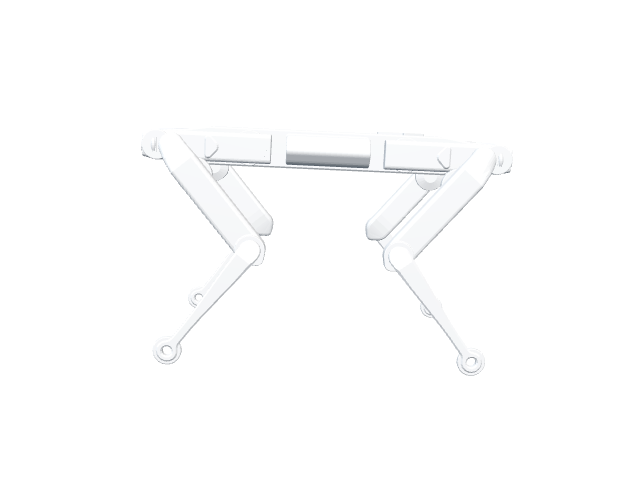
Solo-12
Open torque-controlled quadruped from the ODRI initiative.
Upkie
Wheeled biped that balances, build-it-yourself.
Browse by embodiment
Jump straight into a class. Counts reflect the catalog.
What Motari is
The hardware and reproducibility layer for open robotics.
Own the hardware layer
Standardized source metadata, visual evidence, BOM evidence, and a transparent reproducibility score, so buildability is a first-class, sortable property.
Defer models and code
Motari links out to Hugging Face for models and datasets and to GitHub for source. We index the physical robot, we do not replace them.
Agent-seeded, owner-claimable
Pages are assembled from public sources, then maintainers claim their robot to review and update source-backed catalog metadata.